|
|
|||||||||
Open Source Towed Sonar ROVOperating depth: 3000 feetNot every marine archeologist, oceanographer, wreak hunter, search and recovery diver, can afford the equipment used by British Petroleum, Scripps or Woods H ole, but we want to help change that. What to help? Contact me. Doug Jackson, svseeker@ymail.com 918-630-4050 If you'd like to provide some input, just write call, or join and post to our FaceBook group: SVSeeker Skype account: SVSeeker
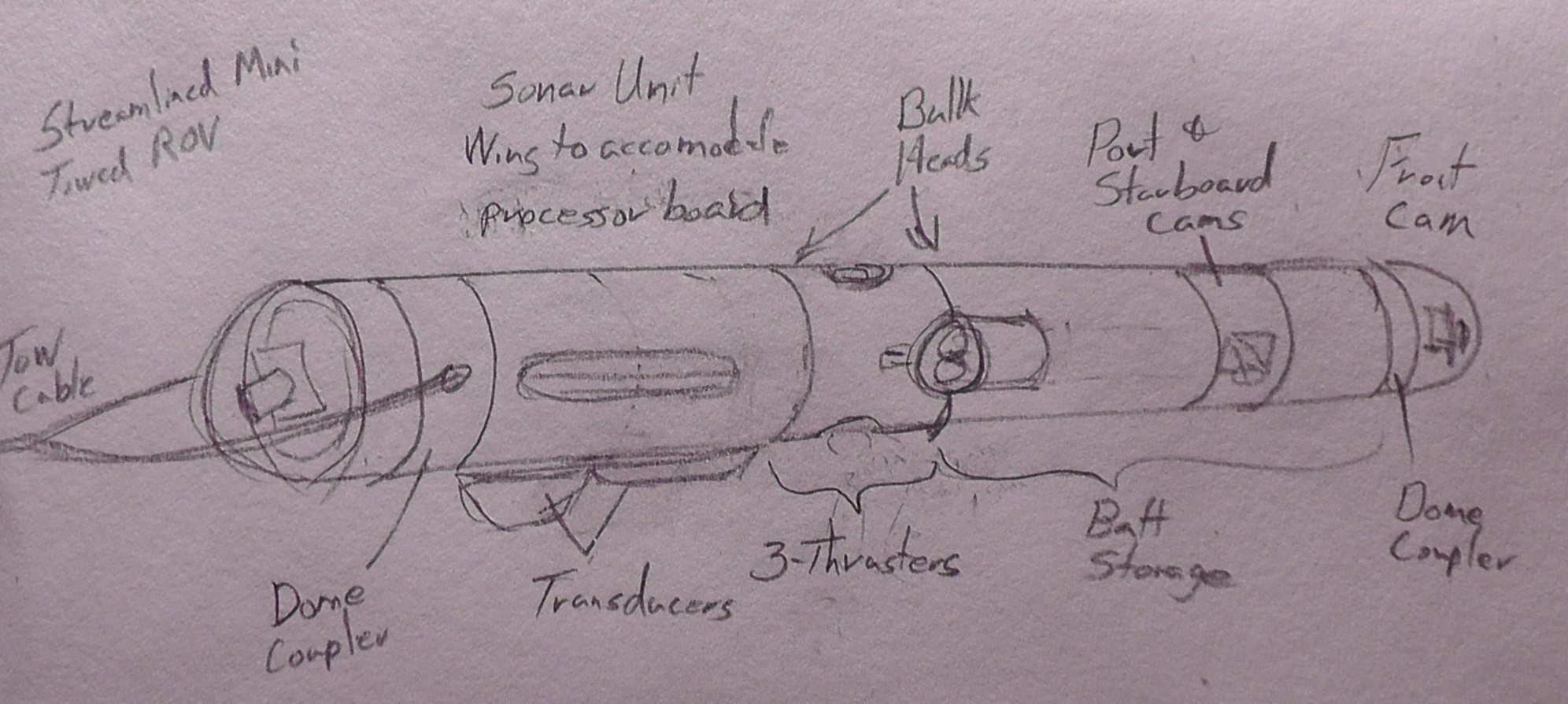
Specifications* Open Source - All plans and instructions are free and
online. The design uses 3 1/2" aluminum pipe and machined acrylic view ports for the cameras. The thrusters, lights, cameras, batteries, and sonar are each housed in separate sections of pipe. The pipes are joined by machined aluminum couplers that use o-rings for sealing which allows access and seals the section. The thrusters and lights sections are "wet" or allowed to flood. The unit is towed backwards so that it drags the tow cable behind it when it propels itself forward when operating as an ROV. The joined sections allow the unit to be easily reconfigured for different missions. A complete configuration from front to back is a tilt HD IP camera housed in an acrylic dome and the tile action is powered by a mini RC servo, a two piece aluminum coupler behind the tilt camera allows this section to be opened for maintenance. Behind the coupler is an section of .7" wall acrylic tube that houses two tilt cameras, one looking left and the other looking right. An aluminum coupler and bulkhead then separates the dry camera section from a free flooding thruster section that contains two maneuvering thrusters. The maneuvering thrusters are housed in tubes that completely pass through the hull, so they draw water from one side and exhaust it to the other. One of these thrusters is aligned vertically and the other horizontally. The motors the power the thrusters are 100 watt 800Kv Brushless Outrunner motor commonly used on electric RC airplanes. The ball bearings have been replaced with sintered bronze bushings and the coils have been vacuumed potted to protect the varnish. As an outrunner, the coils are stationary and the outer shell of the motor turns which creates little resistance when flooded with water. And outrnner motors run at lower rpm, as the 800kv which means the motors theoretical maximum rpm is 800 rpm per volt which while very fast is much slower that other RC motors and hence better for pushing water with a propeller. A watertight battery section comes next. This is simply a length of 3 1/2" aluminum pipe that has the inside diameter on each end machined so that it fits tightly over the aluminum coupler's o-rings on each end. We use a simple homemade line boring tool to machine the ID of the pipe so it is possible to easily be modified the length of this section in the field. A longer section provides for more battery storage or more buoyancy for external devices to be added or more inside storage capacity for additional instruments. In addition to batteries this section contains the Arduino controler, RC ESC's (Electronic Speed Controllers) for the forward and main thrusters, an Ethernet network switch for the IP cameras and other network connected devices, and a SDSL2 transceiver to transmit the Ethernet connection over 4,000 feet of cable to the surface. The center section is is again free flooding, and provides a mount for the main thrusters, one on each side, as well as a mount for the Lowrance SonarHub board housing. The board is an removed from an off-the-shelf Lowrance product called a SonarHub. It is a single board computer that is dedicated to processing signals from either a sidescan sonar or a scanning sonar. Lowrance's product names for these are StructureScan and SpotlightScan. The output form the SonarHub is Ethernet that is connected to the Lowrance display console on the surface. The top of this section is the connection point for the tow cable which is simply a length of Cat5 burry type Ethernet cable. The top of this section can also mount a dive wing. When under tow the force of the pull lifts the dive wing to about 30 degrees so it forces the unit deeper. This help the unit obtain it's 3000 foot maximum working depth with with less cable that what would normally be required. When the surface boat stops and the load on the tow cable is removed, a spring retracts the dive wing from the 30 degree angle to a horizontal position. This allow the unit to operate as an ROV and move around with it's thrusters without changing it's pitch or altitude due to the pitch of the dive wing. The next section toward the aft is another battery compartment. In addition to batteries this section also contains ESC's for the aft thrusters, as well as Arduino controlled relay switches
|